|
|
||
|---|---|---|
| .. | ||
| documentation | ||
| kubeflow | ||
| pose_estimation | ||
| tests | ||
| .gitignore | ||
| Dockerfile | ||
| README.md | ||
| config.yaml | ||
| environment-gpu.yml | ||
| environment.yml | ||
| setup.py | ||
README.md
Object Pose Estimation Model
This section contains code for training and evaluating a deep neural network to predict the pose of a single object from RGB images. We provide support for running both locally and with Docker.
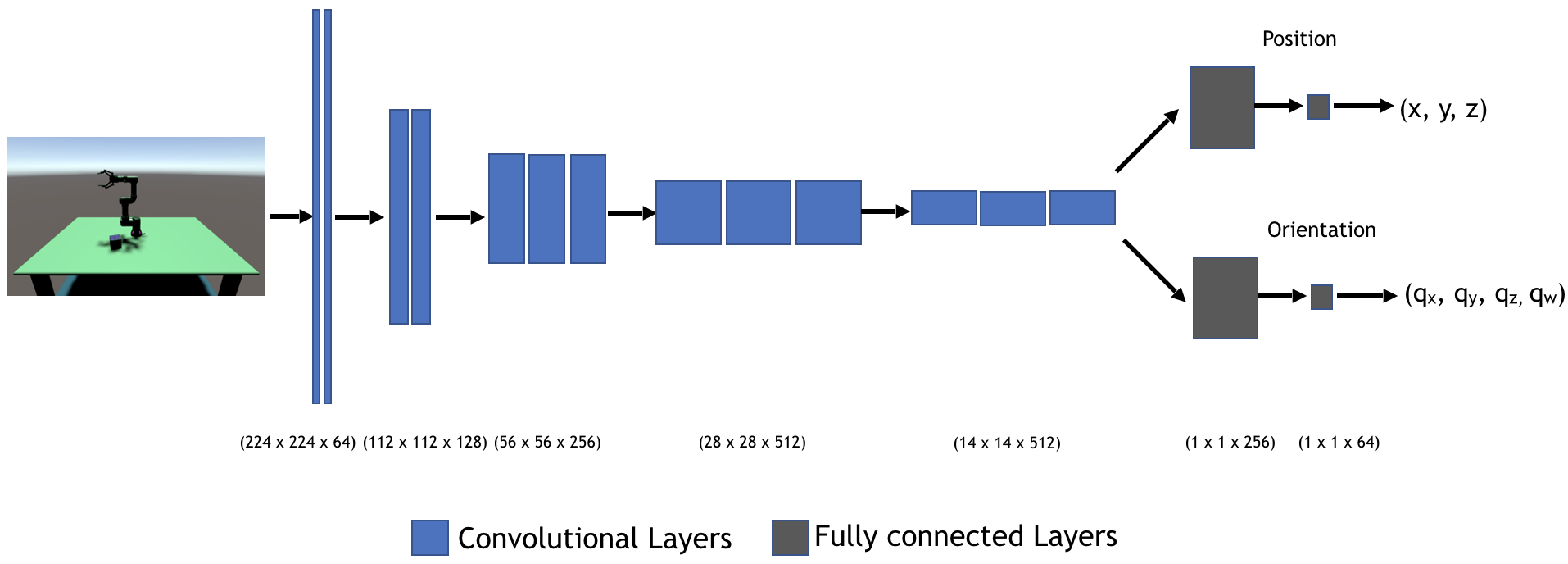
This model is a modified implementation of Domain Randomization for Transferring Deep Neural Networks from Simulation to the Real World, by Tobin et. al. It is based on the classic VGG-16 backbone architecture, and initialized with weights pre-trained on the ImageNet dataset. The head of the network is replaced with a 3D position prediction head that outputs (x, y, z), and an orientation predicton head that outputs a quaternion (qx, qy, qz, qw).
Quick Start (Recommended)
We trained this model on sythetic data collected in Unity. To learn how to collect this data and train the model yourself, see our data collection and training tutorial.
Pre-Trained Model
We've provided a pre-trained model, which can be downloaded here.
Setup
CLI
This model supports a train and an evaluate command. Both of these have many arguments, which you can examine in cli.py. They will default to the values in config.yaml for convenience, but can be overridden via the command line.
The most important train arguments to be aware of are:
--data_root: Path to the directory containing your data folders. These directory should includeUR3_single_cube_trainingandUR3_single_cube_validation, containing the training and validation data, respectively.--log-dir-system: Path to directory where you'd like to save Tensorboard log files and model checkpoint files.
The most important evaluate arguments to be aware of are:
--load-dir-checkpoint: Path to model to be evaluated.--data_root: Path to the directory containing your data folders. These directory should includeUR3_single_cube_trainingandUR3_single_cube_validation, containing the training and validation data, respectively.
Performance
Below is a description of the model's performance on predicting the pose of a cube. For the loss, we used the L2 norm for the position and orientation in each batch.
However, we used different metrics to evaluate the performance of the model.
- To evaluate translation predictions, we measured the average L2 norm over the dataset.
- To evaluate the orientation predictions, we used the angle between the orientation of the prediction and the orientation of the target, averaged over the dataset (implementation here).
| Training Error | Validation Error | |
|---|---|---|
| Translation | 0.012 (12% of cube's size) | 0.01 (10% of cube's size) |
| Orientation (radian) | 0.06 | 0.05 |
Note: Data for the above experiment was collected in Unity 2020.2.1f1.
Unit Testing
We use pytest to run tests located under tests/. You can run the tests after following the setup instructions in Running on Local with Conda commands.
You can run the entire test suite with:
python -m pytest
or run individual test files with:
python -m pytest tests/test_average_translation_mean_square_error.py
Resources
- Documentation describing structure of the model code
- Domain Randomization for Transferring Deep Neural Networks from Simulation to the Real World
- Pose Estimation Tutorial