This pr is auto merged as it contains a mandatory file and is opened for more than 10 days. |
||
|---|---|---|
| cmvae | ||
| datagen | ||
| figs | ||
| imitation_learning | ||
| racing_models | ||
| racing_utils | ||
| CODE_OF_CONDUCT.md | ||
| LICENSE | ||
| README.md | ||
| SECURITY.md | ||
README.md
Learning Visuomotor Policies for Aerial Navigation Using Cross-Modal Representations
This repository provides a code base to evaluate and train models from the paper "Learning Visuomotor Policies for Aerial Navigation Using Cross-Modal Representations".
ArXiv pre-print: https://arxiv.org/abs/1909.06993
Paper video: https://youtu.be/VKc3A5HlUU8
License and Citation
This project is licensed under the terms of the MIT license. By using the software, you are agreeing to the terms of the license agreement.
If you use this code in your research, please cite us as follows:
@article{bonatti2020learning,
title={Learning Visuomotor Policies for Aerial Navigation Using Cross-Modal Representations},
author={Bonatti, Rogerio and Madaan, Ratnesh and Vineet, Vibhav and Scherer, Sebastian and Kapoor, Ashish},
journal={arXiv preprint arXiv:1909.06993},
year={2020}
}
Recommended system
Recommended system (tested):
- Ubuntu 18.04
- Python 2.7.15
Python packages used by the example provided and their recommended version:
- airsimdroneracingvae==1.0.0
- tensorflow==2.0.0-beta1
- msgpack-rpc-python==0.4.1
- numpy==1.16.4
- matplotlib==2.1.1
- scikit-learn==0.20.4
- scipy==1.2.2
- pandas==0.24.2
Downloading the drone racing files
In order for you to train the models and run Airsim you first need to download all image datasets, behavior cloning datasets, network weights and Airsim binaries:
- Download all files and datasets Drone Racing files v. 1.0
- Extract all individual files in the folders
- Place the
settings.jsonfile inside~/Documents/AirSimin your computer
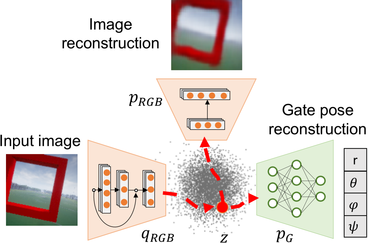
Training and testing the cross-modal VAE representation
In order to train the cross-modal representations you can either use the downloaded image dataset from the previous step, or generate the data yourself using Airsim.
Training with downloaded dataset
- Go to folder
cmvae, and inside filetrain_cmvae.pyedit variabledata_dirto the correct path of the extracted dataset within your computer. The default value is the directory with 1K images. But for final training you will need more images, such as the 50K or 300K datasets - Also, edit variable
output_dirto the correct place where you want the models to be saved - Run
train_cmvae.py
- Network weights will be saved every 5 epochs by default, and you can check loss values with tensorboard or by looking at the terminal
- Once the network is trained you can evaluate it using another script, which will automatically plot histograms of errors, image reconstructions and latent space interpolations:
eval_cmvae.py
Generating your own dataset with Airsim
You may want to generate a custom dataset for training you cross-modal VAE. Here are the steps to do it:
- Start the Airsim environment from the binary file:
$ cd /yourpath/all_files/airsim_binaries/vae_env
$ ./AirSimExe.sh -windowed
- If it asks if you want the car model, click
No - Inside the file
datagen/img_generator/main.pyfirst change the desired number of samples and saved dataset path - Run the script for generating data:
main.py # inside datagen/img_generator
- Once the dataset is generated, follow the previous scripts for training the CM-VAE
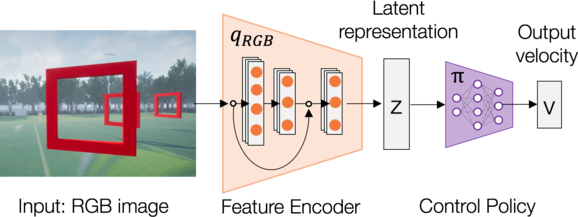
Generating imitation learning data for racing
In order to train the behavior cloning networks you can either use the downloaded image-action pairs dataset or generate the data yourself using Airsim.
Training with downloaded dataset
- Go to folder
imitation_learning, and inside filetrain_bc.pyedit variablesbase_path,data_dir_list, andoutput_dir. By default you will be using downloaded datasets with 0m to 3m of random gate displacement amplitude over a course with 8m of nominal radius - Edit the variables relative to the training mode (full end-to-end, latent representation or regression as latent representation) and weights path for the latent representations (not applicable for full end-to-end learning)
- Run the script for training the behavior cloning policies:
train_bc.py
Generating your own imitation learning dataset with Airsim
You may want to generate a custom dataset for training you behavior cloning policies. Here are the steps to do it:
- Start the Airsim environment from the binary file (not the same one for generating images for the cross-modal representation!):
$ cd /yourpath/all_files/airsim_binaries/recording_env
$ ./AirSimExe.sh -windowed
- Inside the file
datagen/action_generator/src/soccer_datagen.pychange the desired meta-parameters (number of gates, track radius, gate displacement noise, etc) - Run the script for generating data:
soccer_datagen.py
- Once you're satisfied with the motion, turn off trajectory visualization parameter
viz_traj. Otherwise the recorded images will show the motion line - Once the quad is flying, press
ron your keyboard to start recording images. Velocities will be automatically recorded. Both are saved inside~/Documents/AirSim
Now you`ll need to process the raw recording so that you can match the time-stamps from velocity commands and images into a cohesive dataset. To do it:
- Inside
/Documents/AirSim, copy the contents of both folders (moveOnSpline_vel_cmd.txt,imagesfolder andimages.txtfile) into a new directory, for example/all_files/il_datasets/bc_test. - In
datagen/action_generator/src/data_processor.py, modify variablebase_pathto/all_files/il_datasets/bc_test. Then run:
data_processor.py
- Finally, can train
train_bc.pyfollowing the previous steps. You can combine different datasets with different noise levels to train the same policy
Deploying the trained policies
Now you can deploy the trained policies in AirSim, following these steps:
- Start the Airsim environment from correct binary file:
$ cd /yourpath/all_files/airsim_binaries/vae_env
$ ./AirSimExe.sh -windowed
- In file
imitation_learning/bc_navigation.py, modifypolicy_typeandgate_noise. Then run:
bc_navigation.py
The policies trained in AirSim using the cross-modal representations can transferred directly towards real-world applications. Please check out the paper and video to see more results from real-life deployment.

Contributing
This project welcomes contributions and suggestions. Most contributions require you to agree to a Contributor License Agreement (CLA) declaring that you have the right to, and actually do, grant us the rights to use your contribution. For details, visit https://cla.opensource.microsoft.com.
When you submit a pull request, a CLA bot will automatically determine whether you need to provide a CLA and decorate the PR appropriately (e.g., status check, comment). Simply follow the instructions provided by the bot. You will only need to do this once across all repos using our CLA.
This project has adopted the Microsoft Open Source Code of Conduct. For more information see the Code of Conduct FAQ or contact opencode@microsoft.com with any additional questions or comments.