This pr is auto merged as it contains a mandatory file and is opened for more than 10 days. |
||
|---|---|---|
| assets/imgs | ||
| dataloaders | ||
| modules | ||
| .gitignore | ||
| LICENSE | ||
| NOTICE.md | ||
| README.md | ||
| SECURITY.md | ||
| main_pretrain.py | ||
| main_task_caption.py | ||
| main_task_retrieval.py | ||
| metrics.py | ||
| requirements.txt | ||
| util.py | ||
README.md
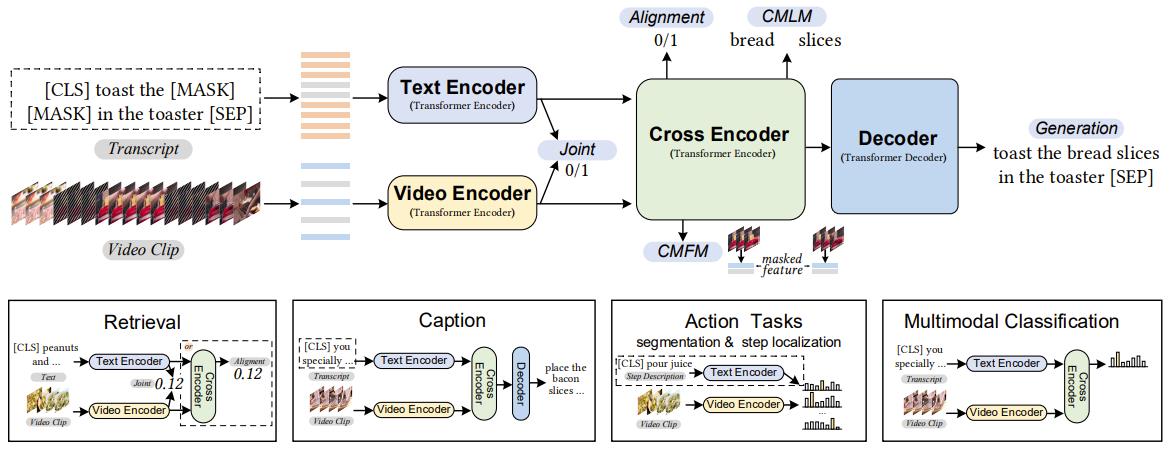
The implementation of paper UniVL: A Unified Video and Language Pre-Training Model for Multimodal Understanding and Generation.
UniVL is a video-language pretrain model. It is designed with four modules and five objectives for both video language understanding and generation tasks. It is also a flexible model for most of the multimodal downstream tasks considering both efficiency and effectiveness.
Preliminary
Execute below scripts in the main folder firstly. It will avoid download conflict when doing distributed pretrain.
mkdir modules/bert-base-uncased
cd modules/bert-base-uncased/
wget https://s3.amazonaws.com/models.huggingface.co/bert/bert-base-uncased-vocab.txt
mv bert-base-uncased-vocab.txt vocab.txt
wget https://s3.amazonaws.com/models.huggingface.co/bert/bert-base-uncased.tar.gz
tar -xvf bert-base-uncased.tar.gz
rm bert-base-uncased.tar.gz
cd ../../
Requirements
- python==3.6.9
- torch==1.7.0+cu92
- tqdm
- boto3
- requests
- pandas
- nlg-eval (Install Java 1.8.0 (or higher) firstly)
conda create -n py_univl python=3.6.9 tqdm boto3 requests pandas
conda activate py_univl
pip install torch==1.7.1+cu92
pip install git+https://github.com/Maluuba/nlg-eval.git@master
Pretrained Weight
mkdir -p ./weight
wget -P ./weight https://github.com/microsoft/UniVL/releases/download/v0/univl.pretrained.bin
Prepare for Evaluation
Get data for retrieval and caption (with only video input) on YoucookII and MSRVTT.
YoucookII
mkdir -p data
cd data
wget https://github.com/microsoft/UniVL/releases/download/v0/youcookii.zip
unzip youcookii.zip
cd ..
Note: you can find youcookii_data.no_transcript.pickle in the zip file, which is a version without transcript. The transcript version will not be publicly avaliable due to possible legal issue. Thus, you need to replace youcookii_data.pickle with youcookii_data.no_transcript.pickle for youcook retrieval task and caption with only video input task. S3D feature can be found in youcookii_videos_features.pickle. The feature is extract as one 1024-dimension vector per second. More details can be found in dataloaders and our paper.
MSRVTT
mkdir -p data
cd data
wget https://github.com/microsoft/UniVL/releases/download/v0/msrvtt.zip
unzip msrvtt.zip
cd ..
Finetune on YoucookII
Retrieval
- Run retrieval task on YoucookII
DATATYPE="youcook"
TRAIN_CSV="data/youcookii/youcookii_train.csv"
VAL_CSV="data/youcookii/youcookii_val.csv"
DATA_PATH="data/youcookii/youcookii_data.pickle"
FEATURES_PATH="data/youcookii/youcookii_videos_features.pickle"
INIT_MODEL="weight/univl.pretrained.bin"
OUTPUT_ROOT="ckpts"
python -m torch.distributed.launch --nproc_per_node=4 \
main_task_retrieval.py \
--do_train --num_thread_reader=16 \
--epochs=5 --batch_size=32 \
--n_display=100 \
--train_csv ${TRAIN_CSV} \
--val_csv ${VAL_CSV} \
--data_path ${DATA_PATH} \
--features_path ${FEATURES_PATH} \
--output_dir ${OUTPUT_ROOT}/ckpt_youcook_retrieval --bert_model bert-base-uncased \
--do_lower_case --lr 3e-5 --max_words 48 --max_frames 48 \
--batch_size_val 64 --visual_num_hidden_layers 6 \
--datatype ${DATATYPE} --init_model ${INIT_MODEL}
The results (FT-Joint) are close to R@1: 0.2269 - R@5: 0.5245 - R@10: 0.6586 - Median R: 5.0
Plus --train_sim_after_cross to train align approach (FT-Align),
The results (FT-Align) are close to R@1: 0.2890 - R@5: 0.5760 - R@10: 0.7000 - Median R: 4.0
- Run retrieval task on MSRVTT
DATATYPE="msrvtt"
TRAIN_CSV="data/msrvtt/MSRVTT_train.9k.csv"
VAL_CSV="data/msrvtt/MSRVTT_JSFUSION_test.csv"
DATA_PATH="data/msrvtt/MSRVTT_data.json"
FEATURES_PATH="data/msrvtt/msrvtt_videos_features.pickle"
INIT_MODEL="weight/univl.pretrained.bin"
OUTPUT_ROOT="ckpts"
python -m torch.distributed.launch --nproc_per_node=4 \
main_task_retrieval.py \
--do_train --num_thread_reader=16 \
--epochs=5 --batch_size=128 \
--n_display=100 \
--train_csv ${TRAIN_CSV} \
--val_csv ${VAL_CSV} \
--data_path ${DATA_PATH} \
--features_path ${FEATURES_PATH} \
--output_dir ${OUTPUT_ROOT}/ckpt_msrvtt_retrieval --bert_model bert-base-uncased \
--do_lower_case --lr 5e-5 --max_words 48 --max_frames 48 \
--batch_size_val 64 --visual_num_hidden_layers 6 \
--datatype ${DATATYPE} --expand_msrvtt_sentences --init_model ${INIT_MODEL}
The results (FT-Joint) are close to
R@1: 0.2720 - R@5: 0.5570 - R@10: 0.6870 - Median R: 4.0
Plus --train_sim_after_cross to train align approach (FT-Align)
Caption
Run caption task on YoucookII
TRAIN_CSV="data/youcookii/youcookii_train.csv"
VAL_CSV="data/youcookii/youcookii_val.csv"
DATA_PATH="data/youcookii/youcookii_data.pickle"
FEATURES_PATH="data/youcookii/youcookii_videos_features.pickle"
INIT_MODEL="weight/univl.pretrained.bin"
OUTPUT_ROOT="ckpts"
python -m torch.distributed.launch --nproc_per_node=4 \
main_task_caption.py \
--do_train --num_thread_reader=4 \
--epochs=5 --batch_size=16 \
--n_display=100 \
--train_csv ${TRAIN_CSV} \
--val_csv ${VAL_CSV} \
--data_path ${DATA_PATH} \
--features_path ${FEATURES_PATH} \
--output_dir ${OUTPUT_ROOT}/ckpt_youcook_caption --bert_model bert-base-uncased \
--do_lower_case --lr 3e-5 --max_words 128 --max_frames 96 \
--batch_size_val 64 --visual_num_hidden_layers 6 \
--decoder_num_hidden_layers 3 --stage_two \
--init_model ${INIT_MODEL}
The results are close to
BLEU_1: 0.4746, BLEU_2: 0.3355, BLEU_3: 0.2423, BLEU_4: 0.1779
METEOR: 0.2261, ROUGE_L: 0.4697, CIDEr: 1.8631
If using video only as input (youcookii_data.no_transcript.pickle),
The results are close to
BLEU_1: 0.3921, BLEU_2: 0.2522, BLEU_3: 0.1655, BLEU_4: 0.1117
METEOR: 0.1769, ROUGE_L: 0.4049, CIDEr: 1.2725
Run caption task on MSRVTT
DATATYPE="msrvtt"
TRAIN_CSV="data/msrvtt/MSRVTT_train.9k.csv"
VAL_CSV="data/msrvtt/MSRVTT_JSFUSION_test.csv"
DATA_PATH="data/msrvtt/MSRVTT_data.json"
FEATURES_PATH="data/msrvtt/msrvtt_videos_features.pickle"
INIT_MODEL="weight/univl.pretrained.bin"
OUTPUT_ROOT="ckpts"
python -m torch.distributed.launch --nproc_per_node=4 \
main_task_caption.py \
--do_train --num_thread_reader=4 \
--epochs=5 --batch_size=128 \
--n_display=100 \
--train_csv ${TRAIN_CSV} \
--val_csv ${VAL_CSV} \
--data_path ${DATA_PATH} \
--features_path ${FEATURES_PATH} \
--output_dir ${OUTPUT_ROOT}/ckpt_msrvtt_caption --bert_model bert-base-uncased \
--do_lower_case --lr 3e-5 --max_words 48 --max_frames 48 \
--batch_size_val 32 --visual_num_hidden_layers 6 \
--decoder_num_hidden_layers 3 --datatype ${DATATYPE} --stage_two \
--init_model ${INIT_MODEL}
The results are close to
BLEU_1: 0.8051, BLEU_2: 0.6672, BLEU_3: 0.5342, BLEU_4: 0.4179
METEOR: 0.2894, ROUGE_L: 0.6078, CIDEr: 0.5004
Pretrain on HowTo100M
Format of csv
video_id,feature_file
Z8xhli297v8,Z8xhli297v8.npy
...
Stage I
ROOT_PATH=.
DATA_PATH=${ROOT_PATH}/data
SAVE_PATH=${ROOT_PATH}/models
MODEL_PATH=${ROOT_PATH}/UniVL
python -m torch.distributed.launch --nproc_per_node=8 \
${MODEL_PATH}/main_pretrain.py \
--do_pretrain --num_thread_reader=0 --epochs=50 \
--batch_size=1920 --n_pair=3 --n_display=100 \
--bert_model bert-base-uncased --do_lower_case --lr 1e-4 \
--max_words 48 --max_frames 64 --batch_size_val 344 \
--output_dir ${SAVE_PATH}/pre_trained/L48_V6_D3_Phase1 \
--features_path ${DATA_PATH}/features \
--train_csv ${DATA_PATH}/HowTo100M.csv \
--data_path ${DATA_PATH}/caption.pickle \
--visual_num_hidden_layers 6 --gradient_accumulation_steps 16 \
--sampled_use_mil --load_checkpoint
Stage II
ROOT_PATH=.
DATA_PATH=${ROOT_PATH}/data
SAVE_PATH=${ROOT_PATH}/models
MODEL_PATH=${ROOT_PATH}/UniVL
INIT_MODEL=<from first stage>
python -m torch.distributed.launch --nproc_per_node=8 \
${MODEL_PATH}/main_pretrain.py \
--do_pretrain --num_thread_reader=0 --epochs=50 \
--batch_size=960 --n_pair=3 --n_display=100 \
--bert_model bert-base-uncased --do_lower_case --lr 1e-4 \
--max_words 48 --max_frames 64 --batch_size_val 344 \
--output_dir ${SAVE_PATH}/pre_trained/L48_V6_D3_Phase2 \
--features_path ${DATA_PATH}/features \
--train_csv ${DATA_PATH}/HowTo100M.csv \
--data_path ${DATA_PATH}/caption.pickle \
--visual_num_hidden_layers 6 --decoder_num_hidden_layers 3 \
--gradient_accumulation_steps 60 \
--stage_two --sampled_use_mil \
--pretrain_enhance_vmodal \
--load_checkpoint --init_model ${INIT_MODEL}
Citation
If you find UniVL useful in your work, you can cite the following paper:
@Article{Luo2020UniVL,
author = {Huaishao Luo and Lei Ji and Botian Shi and Haoyang Huang and Nan Duan and Tianrui Li and Jason Li and Taroon Bharti and Ming Zhou},
title = {UniVL: A Unified Video and Language Pre-Training Model for Multimodal Understanding and Generation},
journal = {arXiv preprint arXiv:2002.06353},
year = {2020},
}
License
This project is licensed under the license found in the LICENSE file in the root directory of this source tree.
Microsoft Open Source Code of Conduct
Acknowledgments
Our code is based on pytorch-transformers v0.4.0 and howto100m. We thank the authors for their wonderful open-source efforts.