|
|
||
|---|---|---|
| images | ||
| samples | ||
| CODE_OF_CONDUCT.md | ||
| LICENSE | ||
| README.md | ||
| SECURITY.md | ||
| jacdac.py | ||
README.md
NOTE: Jacdac has moved to the organization https://github.com/jacdac
Jacdac CircuitPython
This repository implements Jacdac in CircuitPython.
- Read more about Jacdac at https://aka.ms/jacdac
Usage
from jacdac import JDStack
import board
import time
jd = JDStack(board.P12)
while True:
# other app code
jd.process()
time.sleep(.1)
Above is the most minimal program to operate the JACDAC stack. process() must be called regularly to process received packets and to regularly send advertisements from your device. In the sample above, process() is called every 100 milliseconds, though the time between calls to process is tuned depending on bus activity and application demands.
For example, if your program is hosting the accelerometer service, process() will need to be called at least every 10 milliseconds. The accelerometer service may be configured to stream packets every 10 milliseconds, which defines the minimum process() call speed:
from jacdac import JDStack, JDAccelerometer
import time
import adafruit_lsm6ds.lsm6ds33
import board
jd = JDStack(board.P12)
i2c = board.I2C()
accelerometer = adafruit_lsm6ds.lsm6ds33.LSM6DS33(i2c)
jd_accel = JDAccelerometer(accelerometer, jd)
jd.add_service(jd_accel)
while True:
# other app code
jd.process()
time.sleep(.01)
Installation
Currently, Jacdac is not merged into mainline CircuitPython and only works on NRF52-based boards.
A Jacdac-enabled uf2 CircuitPython file for the Adafruit Clue is provided in the samples folder (samples/JD_CPY_CLUE.uf2).
If you are using a different NRF52-based board, you will have to compile CircuitPython yourself by:
- clone https://github.com/jamesadevine/circuitpython and checkout the
jacdacbranch. git submodule init && git submodule sync && git submodule updatecd ports/nrfmake BOARD=<your board> -j 10. For instance to build for clue the command would be:make BOARD=clue_nrf52840_express -j 10. The list of boards can be found inports/nrf/boards
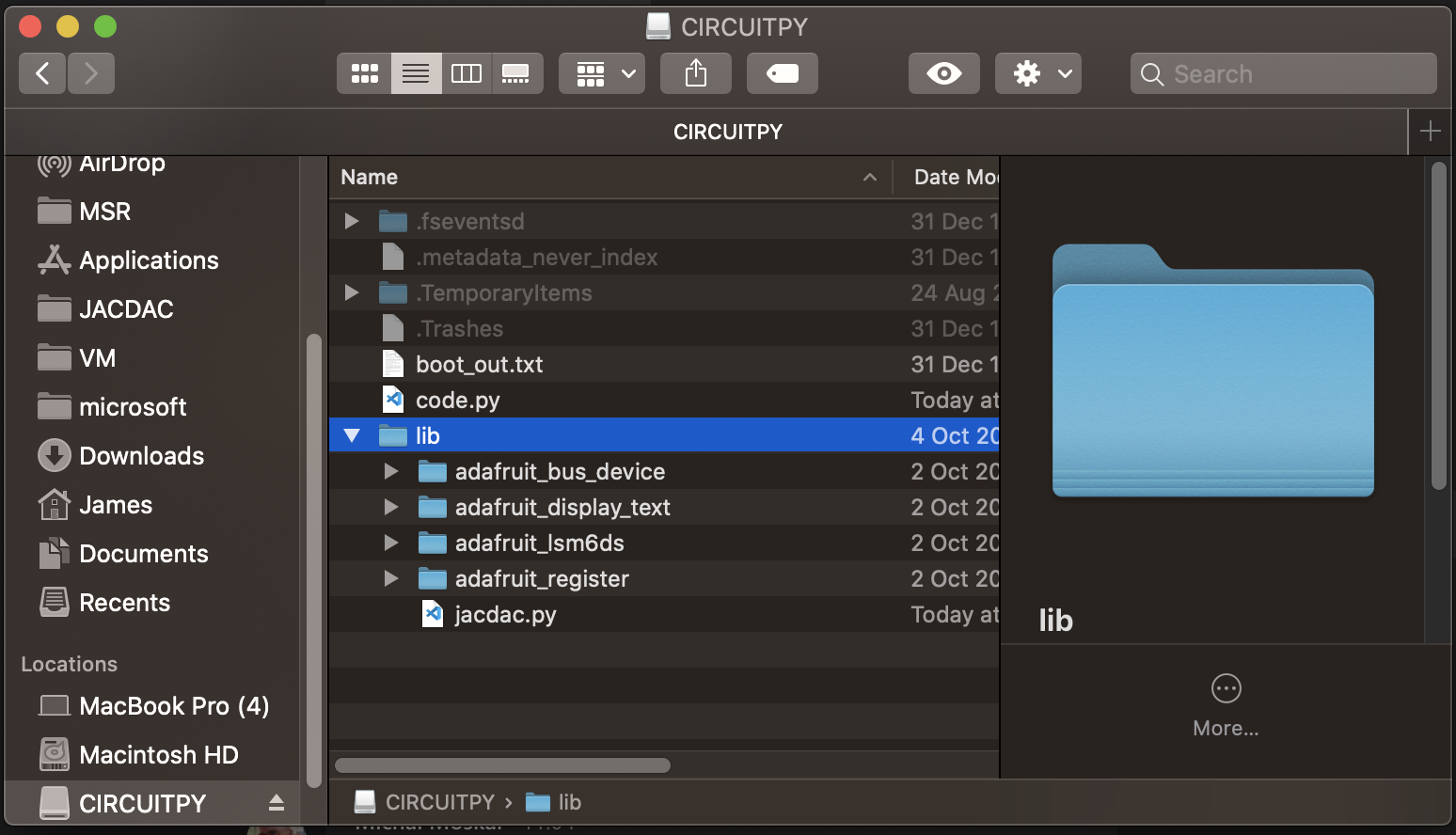
To use the JACDAC stack in your CircuitPython program simply copy jacdac.py to the libs folder on the CIRCUITPY drive. For some of the samples contained in this repository, additional libraries are also required:
adafruit_bus_deviceadafruit_lsm6dsadafruit_display_textadafruit_register
The latest versions of these libraries can be obtained from the Adafruit CircuitPython Bundle. After installation the CIRCUITPY drive should look like:
Contributing
This project welcomes contributions and suggestions. Most contributions require you to agree to a Contributor License Agreement (CLA) declaring that you have the right to, and actually do, grant us the rights to use your contribution. For details, visit https://cla.opensource.microsoft.com.
When you submit a pull request, a CLA bot will automatically determine whether you need to provide a CLA and decorate the PR appropriately (e.g., status check, comment). Simply follow the instructions provided by the bot. You will only need to do this once across all repos using our CLA.
This project has adopted the Microsoft Open Source Code of Conduct. For more information see the Code of Conduct FAQ or contact opencode@microsoft.com with any additional questions or comments.