|
|
||
|---|---|---|
| assets | ||
| docker | ||
| src | ||
| CODE_OF_CONDUCT.md | ||
| LICENSE | ||
| README.md | ||
| SECURITY.md | ||
| SUPPORT.md | ||
| requirements.txt | ||
README.md
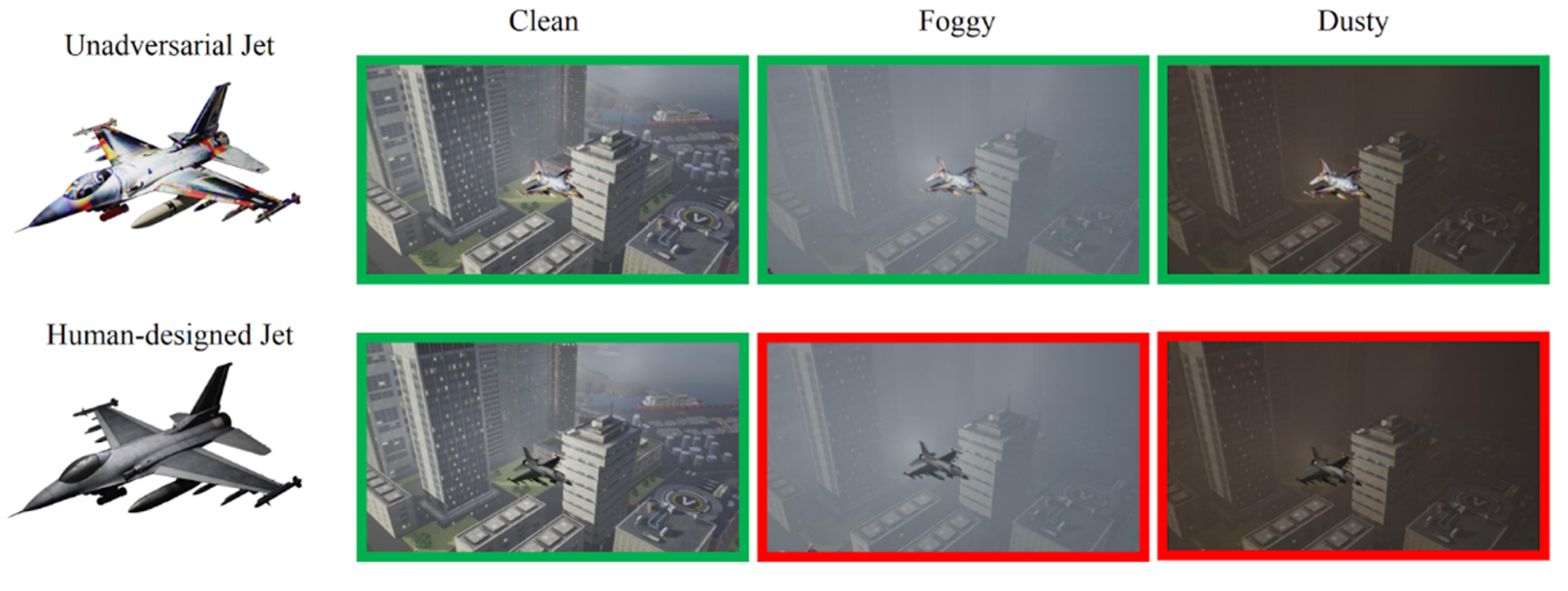
Unadversarial Examples: Designing Objects for Robust Vision
This repository contains the code necessary to replicate the major results of our paper:
Unadversarial Examples: Designing Objects for Robust Vision
Hadi Salman*, Andrew Ilyas*, Logan Engstrom*, Sai Vemprala, Aleksander Madry, Ashish Kapoor
Paper
Blogpost (MSR)
Blogpost (Gradient Science)
@article{salman2020unadversarial,
title={Unadversarial Examples: Designing Objects for Robust Vision},
author={Hadi Salman and Andrew Ilyas and Logan Engstrom and Sai Vemprala and Aleksander Madry and Ashish Kapoor},
journal={arXiv preprint arXiv:2012.12235},
year={2020}
}
Getting started
The following steps will get you set up with the required packages (additional packages are required for the 3D textures setting, described below):
-
Clone our repo:
git clone https://github.com/microsoft/unadversarial.git -
Install dependencies:
conda create -n unadv python=3.7 conda activate unadv pip install -r requirements.txt
Generating unadversarial examples for CIFAR10
Here we show a quick example how to generate unadversarial examples for CIFAR-10. Similar procedure can be used with ImageNet. The entry point of our code is main.py (see the file for a full description of arguments).
1- Download a pretrained CIFAR10 models, e.g.,
mkdir pretrained-models &
wget -O pretrained-models/cifar_resnet50.ckpt "https://www.dropbox.com/s/yhpp4yws7sgi6lj/cifar_nat.pt?raw=1"
2- Run the following script
python -m src.main \
--out-dir OUT_DIR \
--exp-name demo \
--dataset cifar \
--data /tmp \
--arch resnet50 \
--model-path pretrained-models/cifar_resnet50.ckpt \
--patch-size 10 \
--patch-lr 0.001 \
--training-mode booster \
--epochs 30 \
--adv-train 0
You can see the trained patches images in outdir/demo/save/ as training evolves.
3- Now you can evaluate the pretrained model on a boosted CIFAR10-C dataset (trained patch overlaid on CIFAR-10, then corruptions are added). Simply run
python -m src.evaluate_corruptions \
--out-dir OUT_DIR \
--exp-name demo \
--model-path OUT_DIR/demo/checkpoint.pt.best \
--args-from-store data,dataset,arch,patch_size
This will evaluate the pretrained model on various corruptions and display the results in the terminal.
4- That's it!
Generating 3D unadversarial textures
The following steps were tested on these configurations:
- Ubuntu 16.04, 8 x NVIDIA 1080Ti/2080Ti, 2x10-core Intel CPUs (w/ HyperThreading, 40 virtual cores), CUDA 10.2
- Ubuntu 18.04, 2 x NVIDIA K80, 1x12-core Intel CPU, CUDA 10.2
1- Choose a dataset to use as background images; we used ImageNet in our paper, for which you will need to have ImageNet in PyTorch ImageFolder format somewhere on your machine. If you don't have that, you can just use solid colors as the backgrounds (though the results might not match the paper).
2- Install the requirements: you will need a machine with CUDA 10.2 installed (this process might work with other versions of CUDA but we only tested 10.2), as well as docker, nvidia-docker, and the requirements mentioned earlier in the README.
3- Go to the docker/ folder and run docker build --tag TAG ., changing TAG to your preferred name for your docker instance. This will build a docker instance with all the requirements installed!
4- Open launch.py and edit the IMAGENET_TRAIN and IMAGENET_VAL variables to point to the ImageNet dataset, if it's installed and you want to use it. Either way, change TAG on the last line of the file with whatever you named your docker instance in the last step.
5- Alter the parameters in src/configs/config.json according to your setup; the only things we would recommend altering are num_texcoord_renderers (this should not exceed the number of CPU cores you have available), exp_name (the name of the output folder, which will be created inside OUT_DIR from the previous step), and dataset (if you are using ImageNet, you can leave this be, otherwise change it to solids to use solid colors as the backgrounds).
6- From inside the docker folder, run python launch.py [--with-imagenet] --out-dir OUT_DIR --gpus GPUS from the same folder. The --with-imagenet argument should only be provided if you followed step four. The OUT_DIR argument should point to where you want the resulting models/output saved, and the GPUS argument should be a comma-separated list of GPU IDs that you would like to run the job on.
7- This process should open a new terminal (inside your docker instance). In this terminal, run GPU_MODE=0 bash run_imagenet.sh [bus|warplane|ship|truck|car] /src/configs/config.json /out
8- Your 3D unadversarial texture should now be generating! Output, including example renderings, the texture itself, and the model checkpoint will be saved to $(OUT_DIR)/$(exp_name).
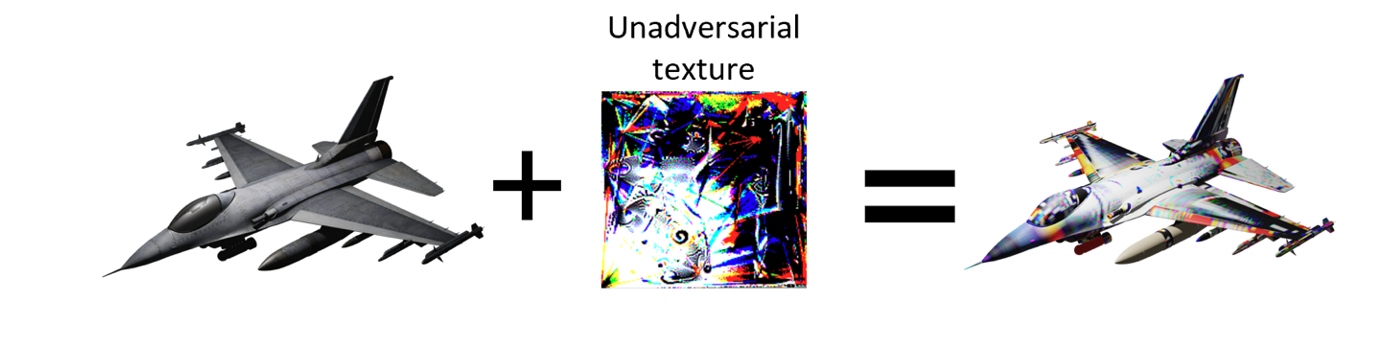
An example texture that you would get for the warplane is
Simulating 3D Unadversarial Objects in AirSim
Coming soon!
Environments, 3D models, along with python API for controlling these objects and running online object recognition inside Microsoft's AirSim high-fidelity simulator.
Maintainers
Contributing
This project welcomes contributions and suggestions. Most contributions require you to agree to a Contributor License Agreement (CLA) declaring that you have the right to, and actually do, grant us the rights to use your contribution. For details, visit https://cla.opensource.microsoft.com.
When you submit a pull request, a CLA bot will automatically determine whether you need to provide a CLA and decorate the PR appropriately (e.g., status check, comment). Simply follow the instructions provided by the bot. You will only need to do this once across all repos using our CLA.
This project has adopted the Microsoft Open Source Code of Conduct. For more information see the Code of Conduct FAQ or contact opencode@microsoft.com with any additional questions or comments.
Trademarks
This project may contain trademarks or logos for projects, products, or services. Authorized use of Microsoft trademarks or logos is subject to and must follow Microsoft's Trademark & Brand Guidelines. Use of Microsoft trademarks or logos in modified versions of this project must not cause confusion or imply Microsoft sponsorship. Any use of third-party trademarks or logos are subject to those third-party's policies.