|
|
||
|---|---|---|
| ArmRobot | ||
| docs | ||
| .gitignore | ||
| LICENSE | ||
| README.md | ||
README.md
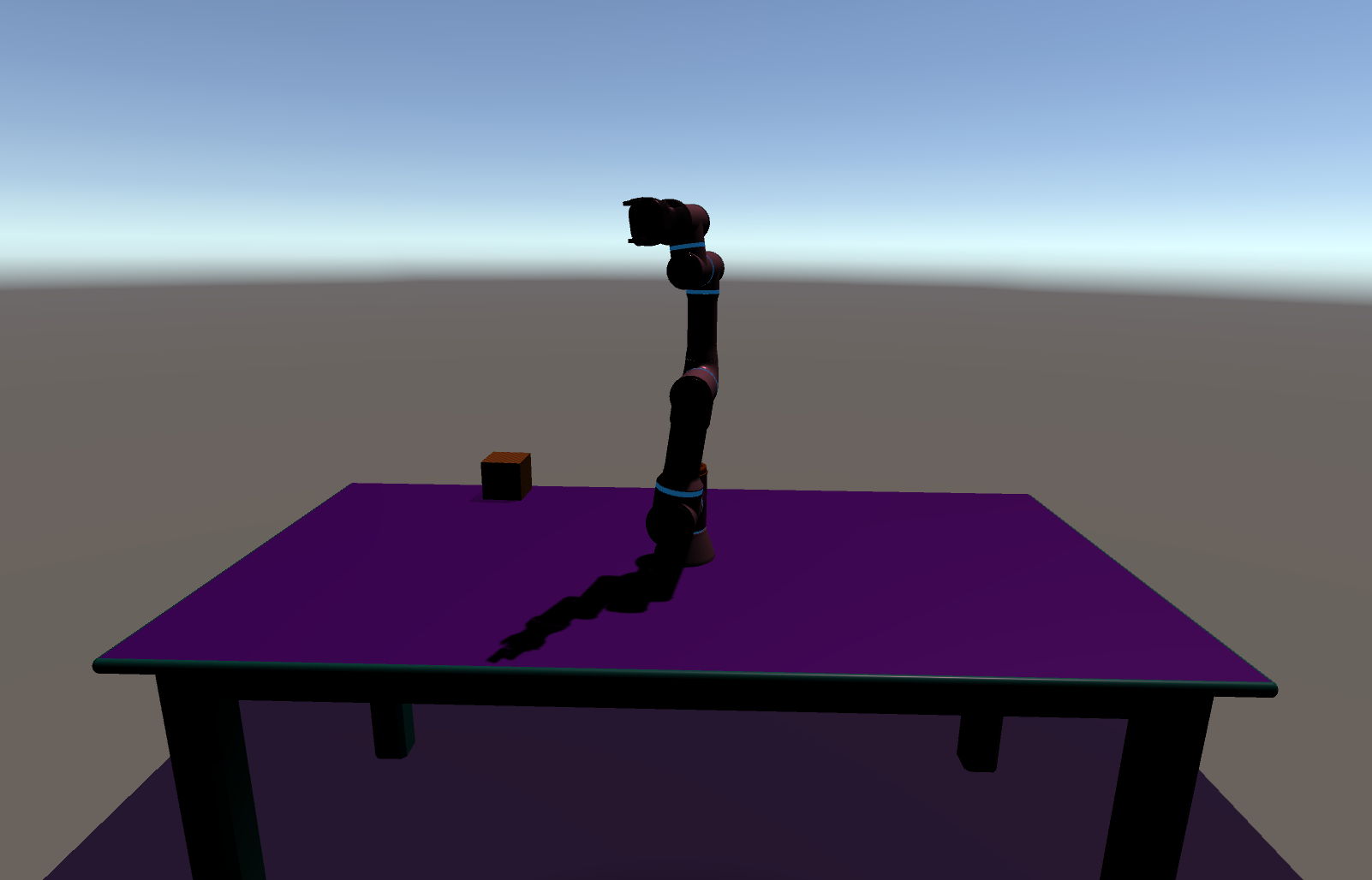
Single Cube Environment
 In this branch, we set up an environment with a [Universal Robotics UR3e](https://www.universal-robots.com/products/ur3-robot/) robot on a table along with a cube.
In this branch, we set up an environment with a [Universal Robotics UR3e](https://www.universal-robots.com/products/ur3-robot/) robot on a table along with a cube.
Open Scenes > ArticulationRobot.
Purpose of the Scene
This scene has been set up to predict the coordonates of the center of the cube in order to feed some algorithm as a Neural Network. The idea behind is to train neural network only using simulated data instead of real data. Nevertheless, the neural network will be then applied on real data. The focus is hence to decrease the reality gap as much as possible which is the difference between the simulated and the real worl. Domain randomization is one of the many techniques enabling to reduce the reality gap. Instead of training a model only on one simulator, we randomize the simulator to expose the model to multiple different environments during training time.
Below is the list of element we randomize:
- The number of source lights
- The direction, the position and the intensity of the light for the source lights
- The position and the texture of the cube
- The position of the robot
- The position, orientation and field of view of the camera
- The texture of the table and the robot
The domain randomization process is controlled by the script DomainRandomization.cs under Assets > Scripts
Glimpse into the code
The orchestror file is Robot > RobotVisionCapture.cs. In this file, at each frame, we extract the position of the cube relative to the camera and we create a datapoint object which is the vector of data we want to extract (see Robot > RobotVisionDataPoint.cs). Then, we capture the image of the VisionCamera and we load the image and the datapoint. We do these two actions in when we call the CaptureIfNeccessary method inside VisionDataCollector.cs file. Then, if we didn't reach the number of simulated data we want to extract, we repeat the process but we need to change the environment of the data by performing domain randomization. This is done in the Reset method.
Inside DomainRandomization.cs, we need to move the robot and the cube. We distinguish their motion as they are completely different objects.
For the robot, I create a method MoveRobot which calls the method ForceJointsToRotation inside the RobotController.cs file. This method forces the joints of the robot to move.
For the cube, I call the Move method from the RandomizerPositionObject.cs file. To generate a new position of the cube, I pick a random point between a square of edge minRobotReach and a square of edge maxRobotReach. This is the area where the robot can reach the object and perform task on it. I also change the orientation of the cube.
For the other elements which are randomized, follow the code inside DomainRandomization.cs and go to the corresponding files to understand how it is done.
Switch to an asymetric cube
The advantage to switch to an asymmetric cube is to train a model for predicting orientation. We define the orientation of an object by its quaternion represensation and to have an asymmetric cube in the scene they are some few steps to do.

- in the
Projectpannel click onMaterials. You will see a file calledNonSymmetricCubeTexture - then click on the
CubeGameObject in theHierarchy. - go under
Alphabet Cube Material (Material) - drag and drop the
NonSymmetricCubeTexturefile in theAlbedovariable underMain Maps - go into
ScriptsunderProject panneland open theDomainRandomization.csscript. Scroll down and comment//the lines 35 and 39. These two lines are responsible of imposing a checker pattern to the cube and also of changing its color.
Then if you want to go back to a symmetric cube, click on the little circle in front of Albedo and select None. Then you can also change the color of the cube. You can also uncomment lignes 35 and 39 of the DomainRandomization.cs script.
Run Simulation
Open Scenes > ArticulationRobot, and press play. To control the number of data you want to extract, you need to change the value of variable Max Samples in the inspector of the VisionDataCollector game object. Then, when you press start and the ismulation is over, if you go to the log, you can see the path on your computer where the data was loaded.

Then, there is two folders inside the data folder: Logs and ScreenCapture. The ScreenCapture folder gathers all the images captured by the mainCanera object whereas Logs gathers all the datapoints inside txt files.
Survey
Your opinion matters a great deal to us. Only by hearing your thoughts can we continue to make Unity a better simulator for robotics. Please take a few minutes to let us know about it.